Жестко с роботом

В Disney создали прыгающего одноногого робота
Фото: DreamWorks, Amblin Entertainment. Фильм Стивена Спилберга о безграничном чувстве любви, на которое способны андроиды. В основе сюжета — постапокалиптическая история, в которой деторождение жестко ограничено, что приводит к изобретению андроидов, имитирующих поведение обычных детей.






")



Адаптивная роботизация — раздел роботизации , занимающийся созданием программ для роботов на основе искажений реальных моделей от идеальных 3D моделей. Основные задачи адаптивной роботизации — снижение времени на программирование роботов для выполнения не серийных заданий на одном роботизированном комплексе. Адаптивная роботизация находит применение в сварке не серийных металлоизделий, габаритных конструкций, окраске, термической резке, шлифовке, фрезеровке и пр. Важное отличие от жестко запрограммированных роботов в том, что управляющая программа адаптивного робота не содержит полного набора необходимой информации; её недостающая часть формируется в процессе функционирования на основе анализа выполняемых действий и контроля измеряемых параметров внешней среды, а также состояния узлов и подсистем робота. Большинство моделей жесткопрограммируемых ПР может быть использовано в адаптивном режиме благодаря оснащению их сенсорными устройствами и соответствующим математическим обеспечением. Алгоритмы управления при этом могут быть достаточно простыми и заключаться в суммировании и сравнении сигналов с датчиков внешней и внутренней информации и формировании корректирующих воздействий на управляющую программу.
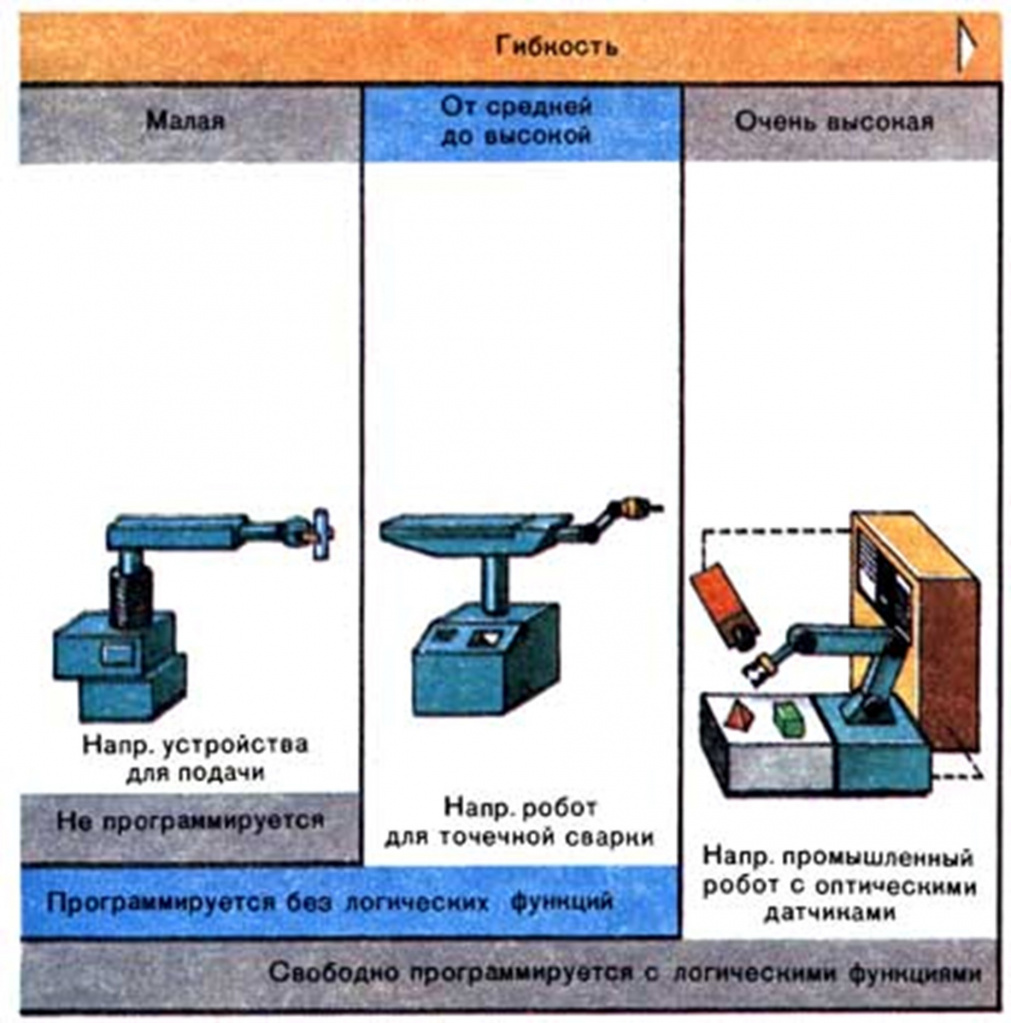
- Раздел: Технология. Системы ПУ промышленными роботами достаточно разнообразны и классифицируются по различным признакам.
- YouTube-блогер Майкл Ривз научил четвероногого робота Spot мочиться пивом по команде.
- Поиск Настройки. Время на прочтение 2 мин.
- Все мировое сообщество коучей, тренеров, бизнесменов спорит последние лет пять на тему «Кто лучше продает: человек, жестко подогнанный под скрипты или тот, кто умеет грамотно импровизировать? Я решил немного пролить свет на этот вопрос и высказать свою точку зрения.
- Параллельный робот — механическая система, использующая несколько последовательных цепей с компьютерным управлением для поддержки одной платформы или концевого эффектора. То есть параллельный робот обладает рабочим звеном, связанным с основанием несколькими кинематическими цепями с несколькими приводами, или налагающим связи на движения робота.
- Сегодня для того, чтобы построить робота разработчики чаще всего используют множество вспомогательных механизмов, датчиков, индикаторов и прочее оборудование. Такие системы громоздки и ненадежны.
- Сегодня сложно кого-то удивить словосочетанием «автоматическая коробка передач», ведь аналоги современных «автоматов» появились еще во времена Ford T. При этом к роботизированным трансмиссиям многие до сих пор относятся с недоверием и опаской.
- Каким образом человек ведет диалог с современными роботами?
- Effective date :



Изобретение относится к гусеничному сварочному роботу. Робот содержит регулируемый магнитный притягивающий модуль 9 , колесно-гусеничные ходовые механизмы 2 , раму 1 гусеничного хода и сварочное навесное устройство Сварочное навесное устройство 11 расположено на раме 1 гусеничного хода. Колесно-гусеничные ходовые механизмы 2 расположены на двух противоположных концах рамы 1 гусеничного хода для обеспечения мощности для перемещения на гусеницах рамы 1 гусеничного хода.